 ABOUT US
ABOUT US
NEWS-



https://www.bilibili.com/video/BV1rU4y1S7c6?share_source=copy_web

Maison Fibre
ICD, University of Stuttgart
Maison Fibre, exhibited at the Venice Architecture Biennale 2021, explores an alternative approach to the design and construction of future habitable spaces. In response to the exhibition theme “How will we live together?”, the Institute for Computational Design and Construction (ICD) and the Institute of Building Structures and Structural Design (ITKE) of the Cluster of Excellence IntCDC at the University of Stuttgart present a full-scale inhabitable installation made entirely from robotically produced, fibrous building elements, constituting the very first multi-story structure of its kind. Maison Fibre offers visitors the intense material experience and spatial expression of future, highly dematerialized structures, where each building element can be locally made from just a few kilos of construction material. Compared to Le Corbusier’s Maison Dom-Ino as a role model for 20th century architecture, the weight footprint of Maison Fibre is reduced fiftyfold and points toward a novel material culture in architecture, as well as the related ecological (material and energy), economic (value chains and knowledge production), technical (digital technologies and robotics), and sociocultural matters entailed herein.

Striatus
Block Reserch Group(BRG), ZHACODE, in3D, Holcim
Striatus is the first of its kind: an arched, unreinforced masonry footbridge composed of 3D-printed concrete blocks assembled without mortar. Exhibited at the Giardini della Marinaressa during the Venice Architecture Biennale until December 2021, the 16x12m bifurcating footbridge combined an ancient structural typology with a state-of-the-art fabrication method to create a new formal language for concrete that is digital, sustainable and circular. 3D concrete printing (3DCP) allows for the design of complex stereotomy and enables the integration of architectural components into the structure. The bridge’s 53 3DCP voussoirs were produced using a 6-axis robotic arm and a two-component (2K) concrete ink. The non-parallel print layers were designed to be orthogonal to the flow of forces, allowing the unreinforced 3D-printed components to be used directly as the main and only structure. Proposing a new language for concrete that is structurally informed, fabrication aware, and ecologically responsible, Striatus optimises the interrelated properties of masonry structures, 3D concrete printing (3DCP) and contemporary design and presents an alternative to traditional concrete construction.

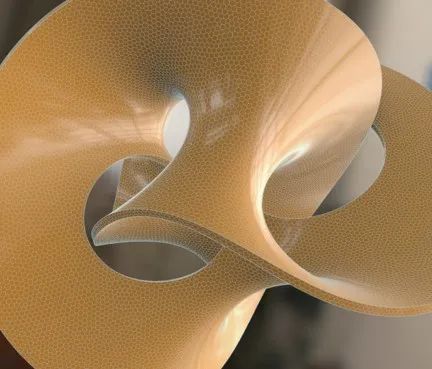
Tortuca: An Ultra-Thin Hollow Glass Bridge
Masoud Akbarzadehm, Yao Lu, et al.
Tortuca is an efficient and innovative structural system constructed by the dry assembly of thirteen hollow glass units. Each unit is made of 1cm glass deck plates and 2cm acrylic side plates precisely cut to match the structural geometry. The structure spans 3.2 meters with a mass of only 250kg, where the float glass is the primary load-bearing material. Moreover, a single person can assemble and disassemble the structure without needing a crane or additional labor. The geometry-based structural design methods of polyhedral graphic statics were used to design the optimized structural form of Tortuca. This research explores the potential of using an extremely delicate material such as float glass as a primary structural system to encourage minimizing the material and energy demands in buildings and infrastructural projects. Furthermore, it shows how the use of construction materials can be minimized and how utilizing the material in its purest format could simplify the recycling process after the life cycle of the structure has ended.
DigitalFUTURES Young Award

Vishu Bhooshan
ZHACODE
Vishu is an Associate at Zaha Hadid Architects, Computation and Design Research group (ZHA CODE) in London. He leads the design research with computational geometries with specific interest on structure and fabrication aware tectonics which incorporate digital form-finding, topology optimisation, statistical learning etc. He also leads the development of a software agnostic computational framework to explore the above.Since joining ZHA in 2013, he has been involved in several design competitions and commissions ranging from research prototypes, product design, galleries, stadiums, metro stations, residential buildings and master plans.
Teaching
Vishu currently is a Lecturer at Architectural Computation and previously a design tutor at Architectural Design, Bartlett post-graduate programs (BPro) at University College of London (UCL). He has taught and presented at several international workshops and professional CAD conferences such as Advances in Architectural Geometry (AAG), ACADIA, CAADRIA, Design Modeling Symposium, DigitalFUTURES and at several institutes in the UK, US, India, China and Brazil.
Education & Prior Experience
Vishu completed his bachelor degree from Pune University, India in 2010 and his Master’s degree at the Architectural Association Design Research Lab, London, UK in 2013. He previously worked as an architect in India at B.S Bhooshan & Associates, Mysore & MindSpace Architects, Bangalore.

Vishu Bhooshan

Yasaman Tahouni
ICD, University of Stuttgart
Yasaman Tahouni is a computational designer, maker, and Ph.D. candidate at the Institute for Computational Design and Construction (ICD), University of Stuttgart. Her research interest lies at the intersection of computation and materiality, and she seeks novel ways to bridge the two to create programmable, adaptive, and performative shape-changing structures. Her current research is focused on biobased and bioinspired 4D printing, for which she develops computational fabrication processes that merge design, additive manufacturing, and biobased “smart” material systems. Yasaman holds a dual M.Sc. degree in Design and Computation (SMArchS) and Electrical Engineering and Computer Science from the Massachusetts Institute of Technology (MIT), and a bachelor’s degree in Architecture from the University of Tehran. She has been a researcher and an educator at MIT and ICD, and her work has been published in various scientific journals, patents, and academic conferences.

Yasaman Tahouni

HUA Chai
CAUP TONGJI
Hua Chai is a Postdoctoral researcher at the College of Architecture and Urban Planning (CAUP) of Tongji University. His research focuses on the computational design and robotic fabrication of timber structures, with a special attention on advanced robotic production technologies for complex timber building systems. He received his Ph.D. from Tongji University in 2022. He visited the Institute for Computational Design and Construction (ICD) at the University of Stuttgart for one year as guest researcher in 2020. His research has been widely published in journals and international conferences including Automation in Construction, ACADIA, Rob|Arch and Fabricate. He is also a Young CAADRIA Award recipient in 2015. He has also been involved in leading several international workshops including DigitalFUTURES (from 2014 to 2022) and ACADIA 2020.

HUA Chai
The Matthias Rippmann Memorial Prize

Daniel Picker
Daniel Piker is a researcher and developer in the field of computational design, mainly focused on form-finding.
After studying architecture at the Architectural Association in London, he has worked at Arup's Advanced Geometry Unit, and as part of the Specialist Modelling Group at Foster+Partners.
He is the author of the software 'Kangaroo' - which enables a range of interactive form-finding, optimisation and physical simulation within McNeel's Rhino3d CAD software, and has been widely used across a range of fields.
He lives in Bristol, where he continues to develop Kangaroo and other design tools.
Kangaroo
DigitalFUTURES Coding Award
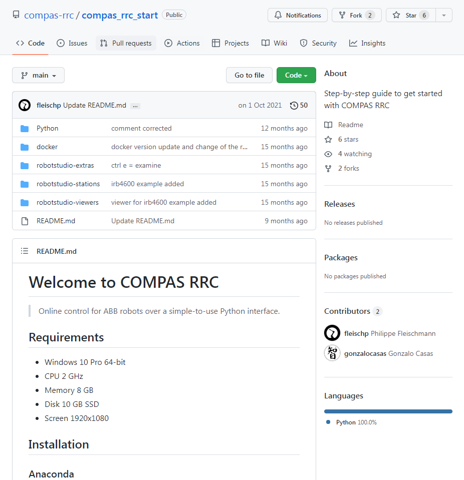
Compas _RRC
COMPAS_RRC is the extension of the COMPAS ecosystem that enables bidirectional online communication between the computational design environment and industrial robot systems.
The ROS-based middleware offers flexible integration possibilities for the most advanced technologies and provides a simple Python API for the user. The software architecture is designed for an ever-growing user and software base.
On the industrial robot side, the native control language is implemented to take full advantage of vendor-specific features and experience. Using a library of predefined functions, specialists can easily develop powerful and customized functions within their own operating environment. This functionality enables easy parametric data exchange of Python and Vendor-specific code. This means that complex tasks and sensor feedback can be executed and recorded synchronously with robot motion, while maintaining the simple interface of COMPAS_RRC.
This approach makes the environment easy to use and to implement for beginners and can also be extended for more complex tasks by specialists up to highly complex industrial systems.

NO.1239 Rd. Siping, SHANGHAI


