学院介绍
学院介绍
新闻中心



第九届“上海数字未来”展览开幕活动于7月6日下午在同济大学建筑与城市规划学院C楼地下展厅成功举行,展览将一直持续到10月14日,欢迎全校师生和社会各界人士前往参观。
2019年7月6日星期六下午13:00,第九届上海“数字未来”暑期工作营成果汇报于同济大学建筑与城市规划学院B楼钟庭报告厅开始,各位工作营导师及学员均出席了会议。会议开始由同济大学袁烽教授致辞,随后各组导师及学员就工作营期间的课题成果进行了精彩的展示和汇报。

成果汇报
Group 1 ETH ZURICH
数字张拉模具混凝土薄壳设计
Philippe Block (ETH Zurich)
Tom Van Mele (ETH Zurich)
助教:张啸
组员:Keerthana Udaykumar,Eleni Maria Skevaki,杜超瑜,李京翰,陈膺义 ,刘可,葛迪,罗丹,徐皓田 ,崔强,胡一昊,张宇萌,王聪,Nikolas Arvanitopoulos,Escudero Gongora jesus,杨烁永,刘瑞,林侃 ,刘皓宇,刘轩,杨清枫,闫建
经过7天的学习,第一组同学逐渐学会了如何通过调用COMPAS中的数据库来完成对rhino 模型中的几何操作(例如求解网格面的向量,offset操作等)。当然在学习过程中还需要大量的计算机图形学的基础,需要同学后期提高。最终的混凝土壳体虽未能来得及浇灌,但是整个框架系统完成了搭建,从节点到脚手架基础体系,提现了模板技术的严谨体系。


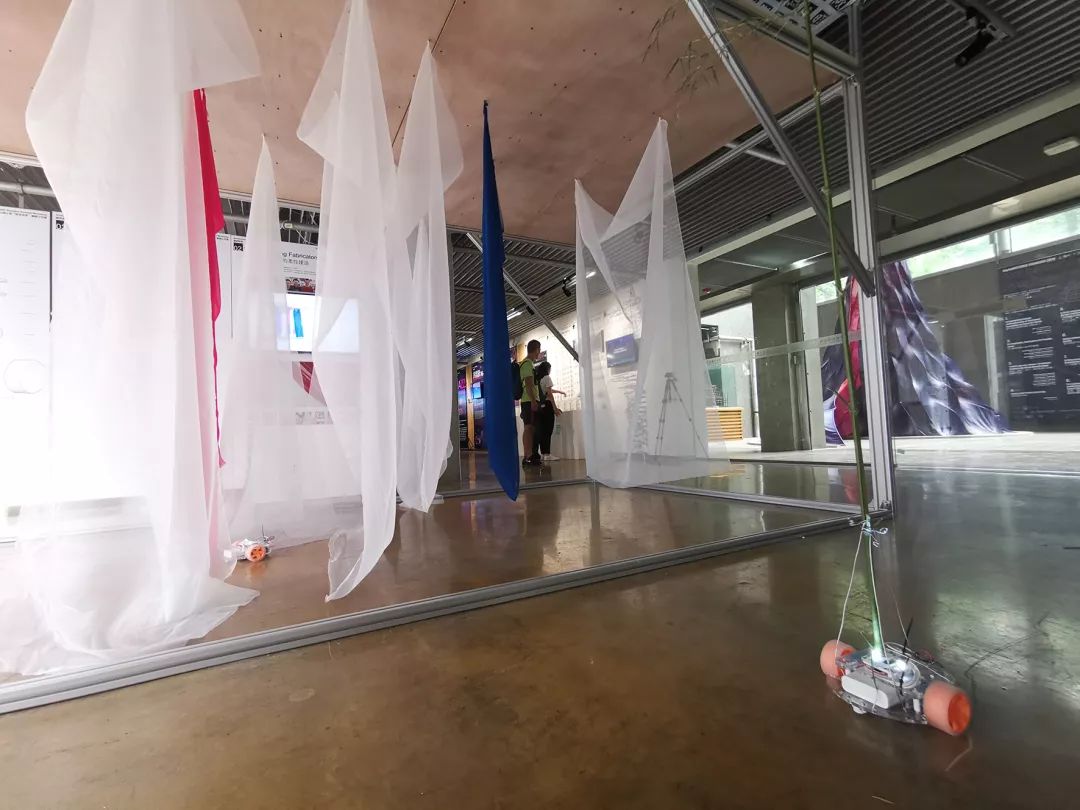
Group 2 ICD STUTTGART
移动机器人的柔性建造
Maria Yablonina (ICD Stuttgart)
Samuel Leder (ICD Stuttgart)
Achim Menges (ICD Stuttgart)
助教:林钰琼,李明阳
组员:Stan Carroll,Daria Dordina,Ahmed Hassab,Virginia Melnyk,Anuj Mittal,Emre Kacar,Pinar Pakfiliz,Saurabh Singla,Tomas Vivanco,Dawid Zając,趙家亘,黄冠铭,刘杨洋,滕腾,田载阳,叶心成,于浩然,袁达钧
第2组致力于通过和一组由可移动机器人驱动的布料进行互动,建立一种可变形的柔性建筑。移动机器人被放置在框架结构的顶部平台,并通过一组磁铁连接和移动布匹。每个机器人由两台直流电动机驱动,并作为单独的动态执行器。这些机器人在布匹移动变化下产生响应式柔性环境。通过一定的人的输入,这些移动机器人以群体的形式移动,产生预期的舞蹈效果。此外,这些移动的布匹通过不同的透明度和颜色的创造了另一层有趣的环境氛围。

Group 3 ZHA | CODE
获取,设计,交付:
城市密集化的综合解决方案
Shajay Bhooshan (ZHA | CODE)
Vishu Bhooshan(ZHA | CODE)
Tommaso Casucci(ZHA | CODE)
助教:周轶凡,李可可,宋雅楠
组员:Ong Yong Siang,palak puri ,李静雯,刘嘉荧,Mark Chou,常宇晗,朱旭栋,宁彤彤,舒琨狄,莫怡晨,李之昊,桑文豪,刘天宇,郭翰宸,徐浩天,徐浩宸 ,张禾珺,高佳宁,涂晗,王耀彬
通过几天高强度的工作营教学 第三组的成员从数据分析到基于机器人热线切割的设计与建造方式进行了探索。小组成员分为四个小组(立面,阳台,楼梯和结构),通过集群单元的设计和建造,回应了工作营的主题。


Group 4 UCL
增强现实木构
Gilles Retsin (UCL)
Johan Wijesinghe(UCL)
Kevin Gino R. Saey(UCL)
助教:苏骏邦
组员:孟子, 张一丹, 叶子桐, 申明敏, 郭思辰, 陆恒, 陈伯晏, 熊世成, 黄瑞, 蔡美醇, 许伟舜, 高子云, 陆淳风, 吴金泽, 孔维泽, Gabriela bello Ugalde, Mia A. Tedjosaputro
经过7天的学习,第四组的组员们了解到了设计语言系统的建立。在经过1~2个单元构件的实践与建造后,学员们了解到从概念设计到建造的准备工作,以及系统化、模块化的过程,简化了设计的繁重,加快了从设计到建造的过程。并在4天时间塔建好两个建筑物。


Group 5 RMIT
御力于形:基于拓扑优化的建筑形态生成与建造
谢亿民 Mike XIE (RMIT)
鲍鼎文 Dingwen BAO (RMIT)
严鑫 Xin YAN (RMIT)
助教:陈哲文,李至
组员:徐晨旭,金沛沛,王鼎明,赵贵佳,董敬哲,张开剑,陈蕴怡,叶可鸣,何雨婷,李丹利,张耿嘉,周保林,吴思远,董照诚,黄钰容,冯文翰,谭钦莹,王珍悦
Lightweight and efficient structural forms often exhibit a type of inherent beauty.
by Mike Xie
精简高效的结构形态常常蕴含着一种内在的美。
——谢亿民院士


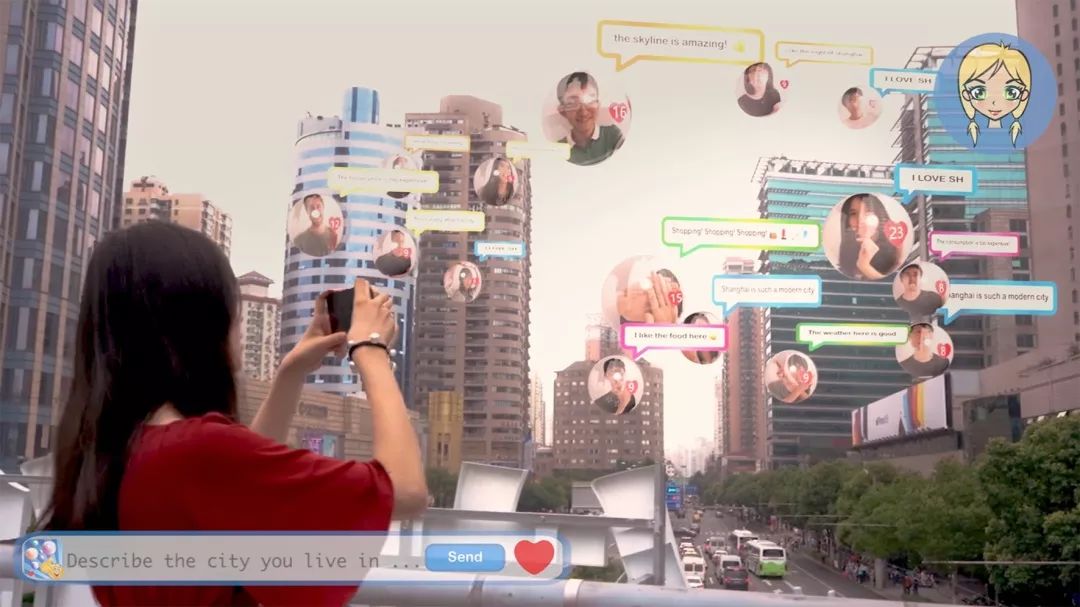
Group 6 USC
混合现实中的城市环境移动平台
Biayna Bogosian (USC / Columbia University)
Alessio Grancini (Doorwi)
Runze Zhang (Doorwi)
助教:朱蔚然
组员:Ommery De Zutter,樊泽坤,郭歌,侯苗苗,金洪勋,唐子一,王鼎禄,王宇杰,魏云琪,王宇轩,徐语键,张灿,周娉,张晓文,朱子媛
在短暂的一周内,几乎没有Unity等平台开发经验的组员们,成功制作出三个基于混合现实的互动式移动端应用程序。应用允许用户在探索城市的同时,感知城市环境数据并与之互动。在工作营的前两天,第六组的成员们对场地进行了定位式环境感知,随即开展了创意设计、应用开发以及可视化等工作。

Group 7 TONGJI + UPenn
人工智能与建筑/城市
Neil Leach (CAUP, Tongji University)
Claudiu Barsan (CAUP, Tongji University)
郑豪 Hao Zheng (University of Pennsylvania)
Group 7-1
助教:赵冰
组员:Oana Nituica,顾卓行,杨心怡,Andrea Macruz,曾绍庭 ,段雪昕,Abhijit Mojum der,许潇涵, 孟林,Reham Ahmed Abdelwahab Hassan,彭茜,陈梓绵,Susmita Biswas Sathi,Radwa Ahmed Abdelhamid Abdelhafez
节奏是理解城市生活的关键,基于环境条件的持续变化,工作营旨在探索人工智能的学习与预测的潜力,并应用Unity ML-Agent与TensorFlow,从而转化为一种生成技术,以使城市设计达到一种像是爵士协奏的奇妙和谐。
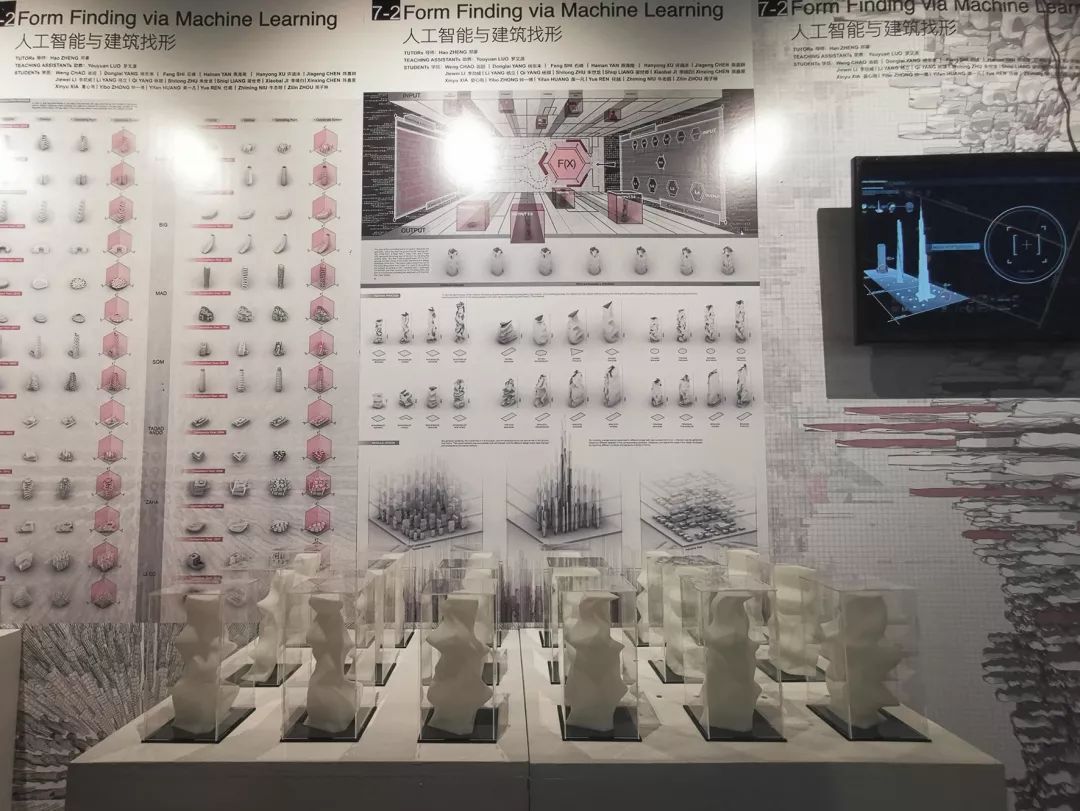
Group 7-2
助教:罗又源
组员:石峰、夏心雨、燕海南、梁世奇、李劼威、牛志明、朱世龙、杨东来、陈鑫星、翁超、陈嘉耕、杨立、钟一博、任越、杨骐、季啸白、周子琳、黄一凡、许涵泳
人工智能有望带来建筑学创作主体的转变。工作营导师郑豪将带领学员以人工神经网络(ANN)为基础,利用建筑特征工程(Feature Engineering)收集不同建筑师作品的形体数据,训练“建筑生形机器”。



Group 8 CITY DATA GROUP
智慧城市决策
汤舸 Tang Ge (MetroDataTech | City Data Group)
黄积小 (大鹏) Huang Jixiao / Dapeng (MetroDataTech | City Data Group)
冯宗良 Feng Zongliang (MetroDataTech | City Data Group)
助教:姚佳伟
组员:陈昱同,邹怡轩,朱海涛,周珍琦,徐欣瑜,王雪辰,王昕悦,彭惠旺,卢玥恒,刘瑞珺,贾文琦,黄辰宇,郭伟鹏 ,付一然,杜明,邓志钱,熊非,孙运娟
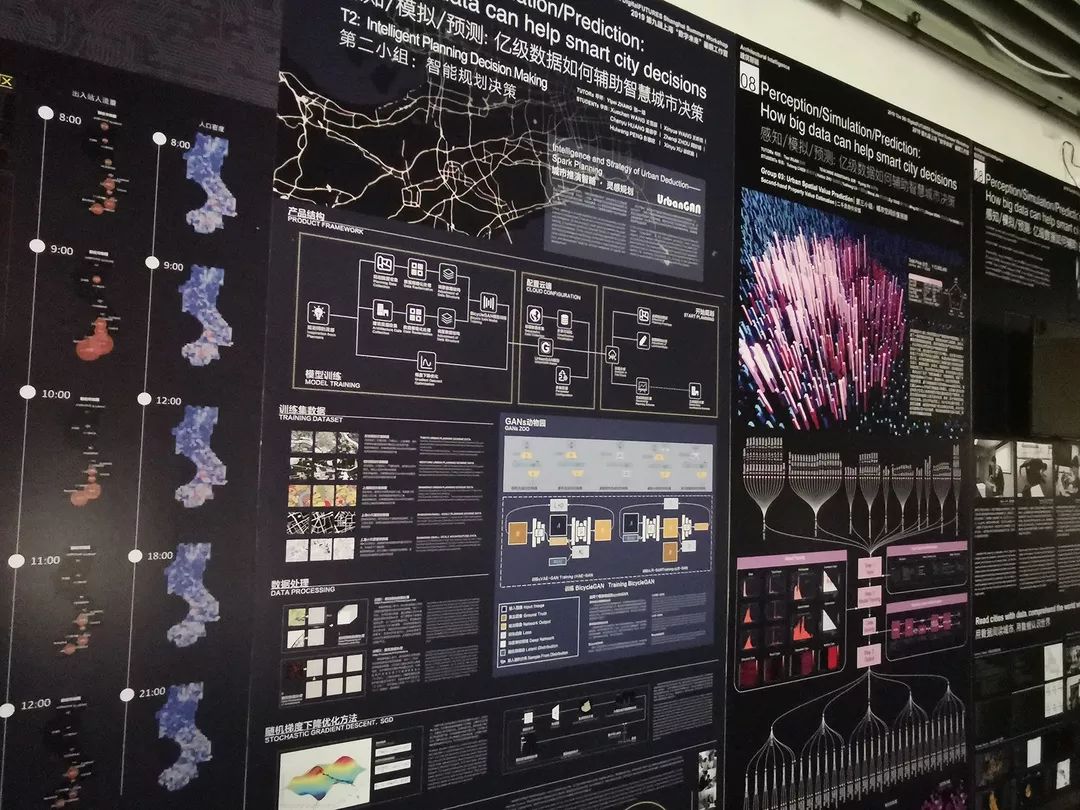
在7天紧张的工作后,第八组的三个小组交出了自己的答卷。第一组使用树莓派测量上海地铁站人群及环境产生的行为大数据,并进行了实时数据分析和可视化;第二组使用AI技术对输入的规划数据进行GAN算法分析,生成规划方案;第三组使用房价相关的城市数据设置了一款智慧城市app原形。各组学生都在这几天经历了测试数据、清洗数据、挖掘数据、训练模型以及页面的前后端界面交互。脉策数据开发的Datamap数据系统平台在这个过程中成为了本组成果的分析、展示的核心技术。
Group 9 TONGJI
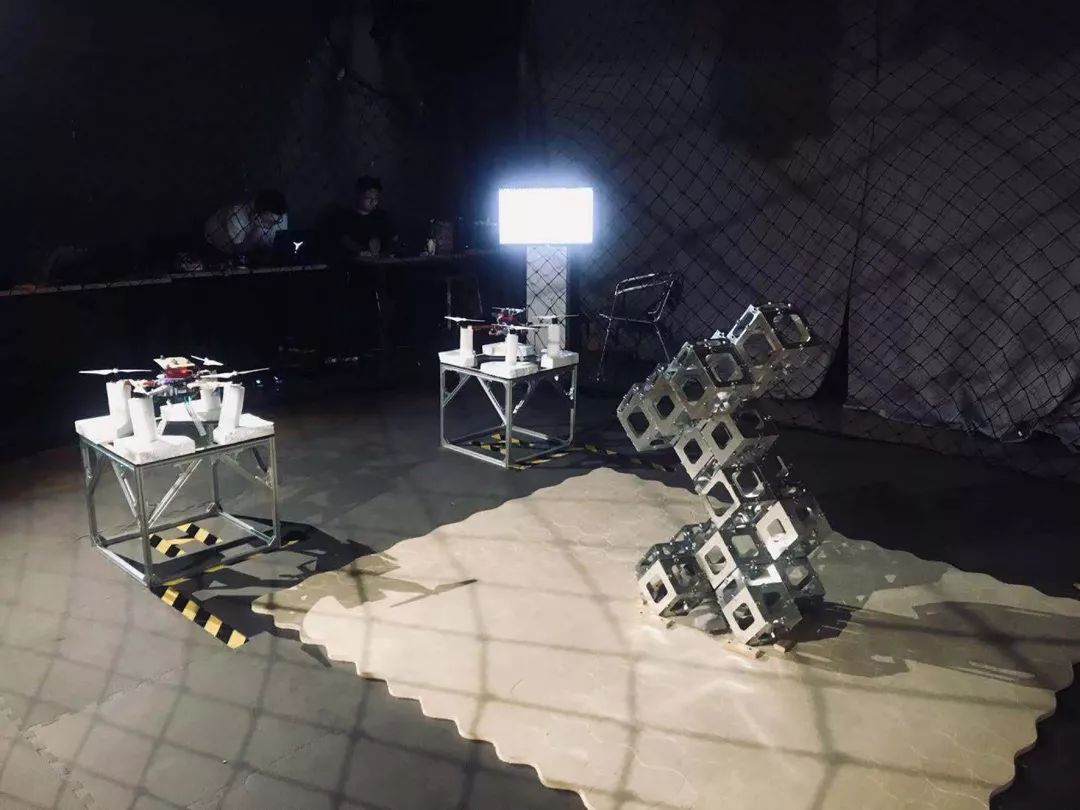
多场协同无人机自主建造
王祥 Xiang Wang (CAUP, Tongji University)
于士贤 Shixian Yu (Beijing LinksTech)
助教:郭喆
组员:魏力恺,卢倚天,林旭辉,王鸿鑫,朱爱宇,胡梓悦,张子豪,肖凯,应晓亮,高思捷,张力骅,李霁欣,吕悠 ,黄梓洵
短暂而充实的夏令营,第九组学员们从最硬核的开源机械控制和硬件系统学起,学习组装无人机,研究离散结构建造的可行性,深入了解了自动化控制理论和移动机器人建造的基本原理。

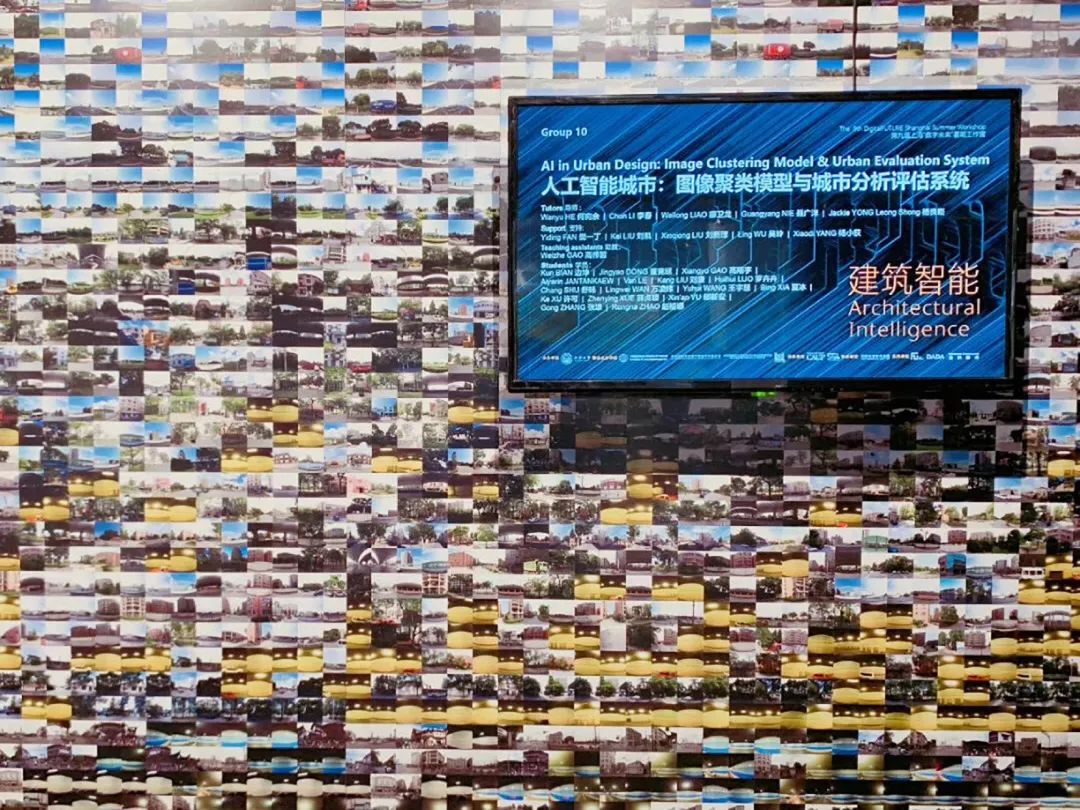
Group 10 XKOOL TECHNOLOGY
人工智能城市:
图像判别模型与城市评估系统
何宛余 Wanyu He (XKool Technology)
李春 Chun Li (XKool Technology)
杨良崧 Jackie Yong (XKool Technology)
廖卫龙 Weilong Liao (XKool Technology)
聂广洋 Guangyang Nie(XKool Technology)
助教:高伟哲
组员:Aiyarin,Van Thahn Le,高翔宇,董竞瑶,夏冰,许可,张塨,罗卉卉,王宇慧,郁新安,薛贞颖,赵榕娜,边坤,刘康,万凌纬,舒畅
城市图像数据如街景图在理解城市具有一定的潜力。本次工作坊尝试聚焦在特定的城市尺度如街道,在去年基于深度学习的图像判别基础上,将其结合无监督学习——聚类,探讨其在街道尺度下的分析和评估系统中的应用可能。

Group 11 UMich
全息构造
Matias del Campo (University of Michigan)
Sandra Manninger (University of Michigan)
助教:金晋磎
组员:肖仲豪,陈家傲,张万荣苗,周芯宇,冯千卉,胡鹏,侯俨洋,杨鸿鑫,周丹妮,谢军,刘晨阳,谢慧,贾冕,刘诗航,Marcus
AR/VR提供了一种全新的位于真实物理环境和计算机驱动的信息之间综合生态,本次工作营将AR/VR技术用于机器人建造,以探索AR/VR技术在建筑领域的新兴应用,并完成数字建造作品。


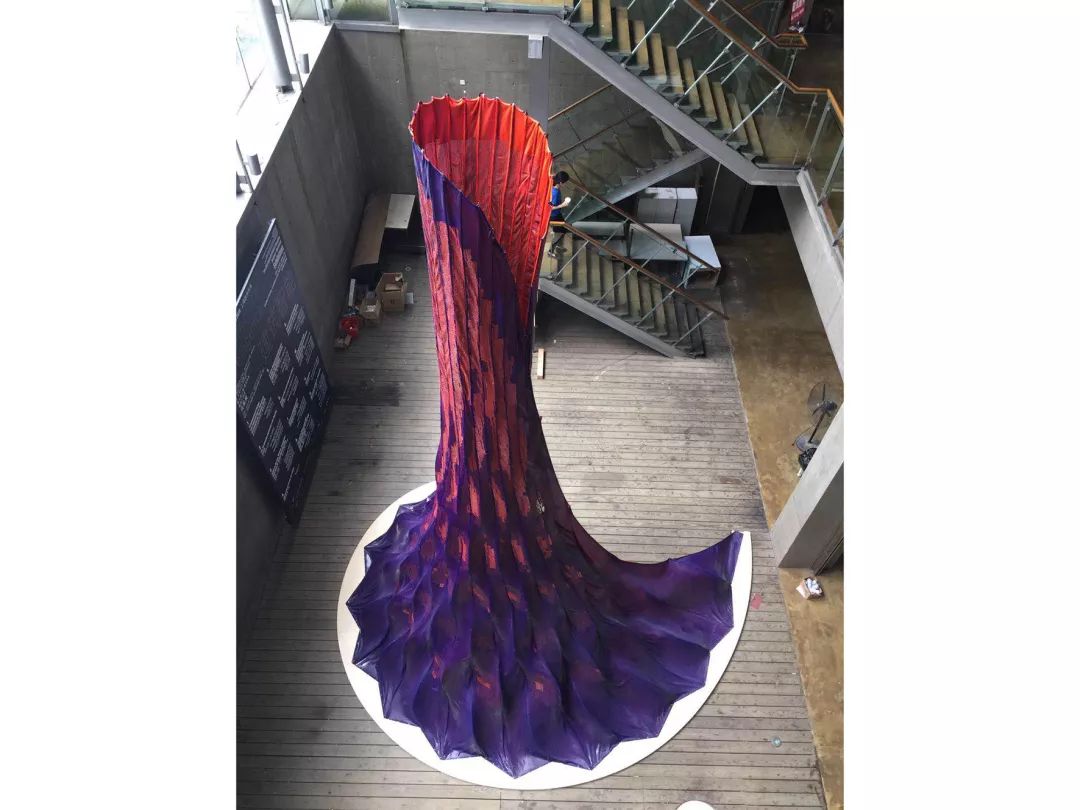
Group 12 TONGJI
多材料机器人建造
袁烽 Philip F. Yuan (CAUP, Tongji University)
李文翰 Jackie Li (Fab-Union)
刘一歌 Yige Liu (CAUP, Tongji University)
柴华 Hua Chai (CAUP, Tongji University | Fab-Union)
张立名 Liming Zhang (CAUP, Tongji University | Fab-Union)
组员:陈奇,胡笳,洪晓菲,黄星泰,郝行,余忠晟,张霭琳,张一苇
通过新材料工艺和机器人建造平台的结合,我们完成了两件多材料建造作品:金属打印与纤维编织桥和织物塔。纤维、织物、树脂等柔性材料的加入自以及机器人金属打印工艺的应用使两件作品都有明显的轻质高强效果。金属打印与纤维编织桥重量不到600kg,跨度达到11米,可承载重量超过1.5吨。织物塔高度达到7.2米,完全实现自支撑,但自重仅为260kg。材料的特性在结构性能化设计和机器人建造的支持下被充分挖掘。


展览开幕
成果汇报结束后,全体成员前往C楼地下展厅。同济大学建筑与城市规划学院院长李振宇为展览开幕发表致辞,同济大学本科生院院长黄一如教授发表致辞,同济大学建筑与城市规划学院副院长孙彤宇到场参与,袁烽教授主持“上海数字未来”工作营成果展开幕。教授Andy Clark, Mark Burry, Teng-Wen Chang,Neil Leach,Gilles Retsin,谢亿民院士,Maria Yablonina等嘉宾分别发表讲话。